
Anansi Hexapod Robot
- University of Canberra
- 2020
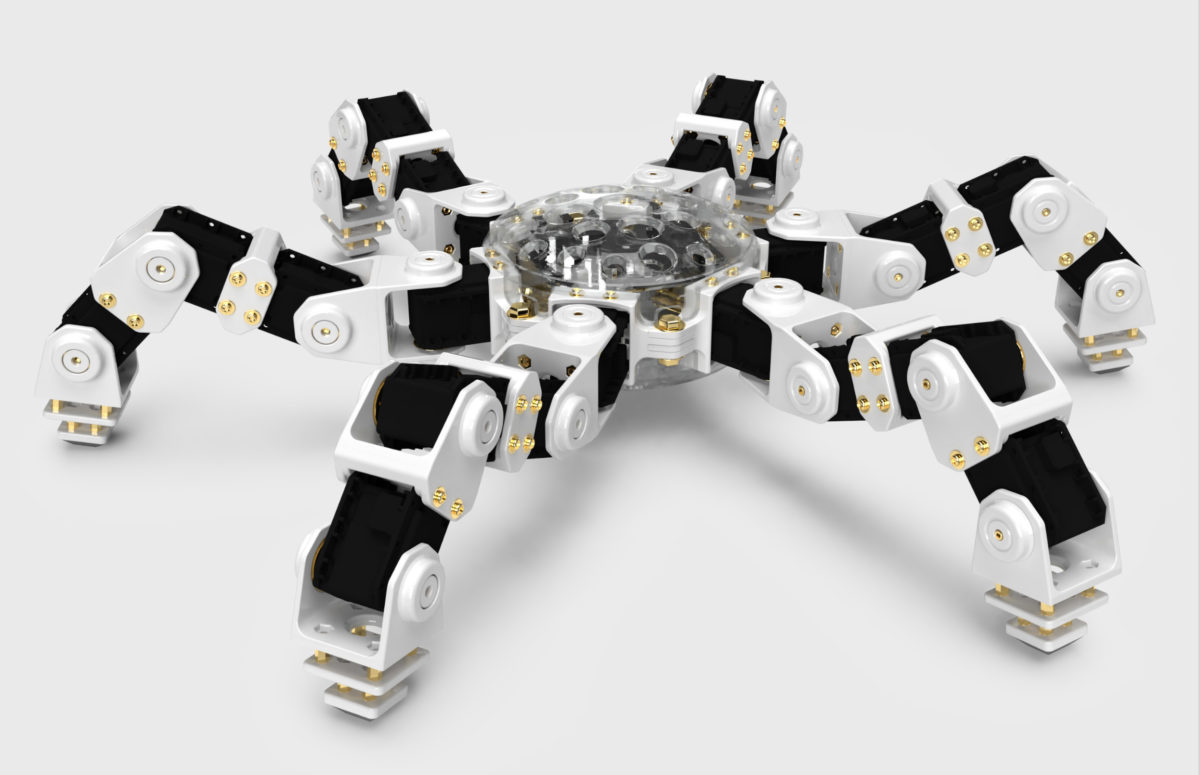
The Anansi Hexapod Robot is a 3D-printable hexapod frame based on 24 Dynamixel MX-28 Robot Actuators. The design is radially symmetrical and offers mounting points for custom electronic components to be added.
I created it for my final-year engineering honours project at the University of Canberra. It was designed to be used as an educational platform for the newly created robotics units at the university.
An earlier version of the Anansi hexapod robot that I designed was used for various Human-Robot Collaboration research, read more here.
GitHub page: https://github.com/BryceCronin/AnansiHexapodRobot
Project poster: Poster_Final-compressed
Anansi Hexapod Renders © 2020 by Bryce Cronin (https://cronin.cloud) is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.




